Selected work
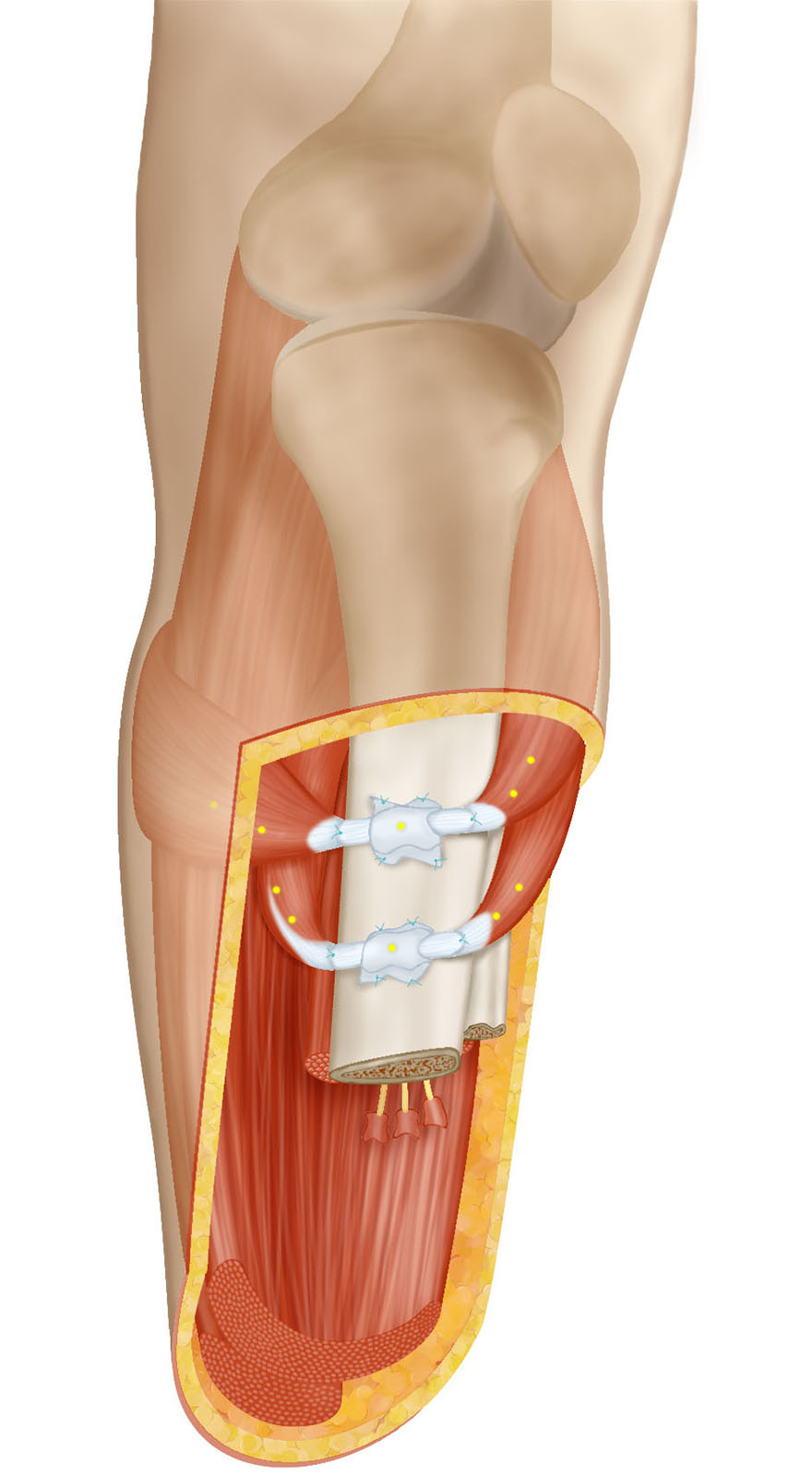
The Ewing amputation, a surgical procedure to enable neural feedback in below-knee amputations by connecting muscles within the residual limb
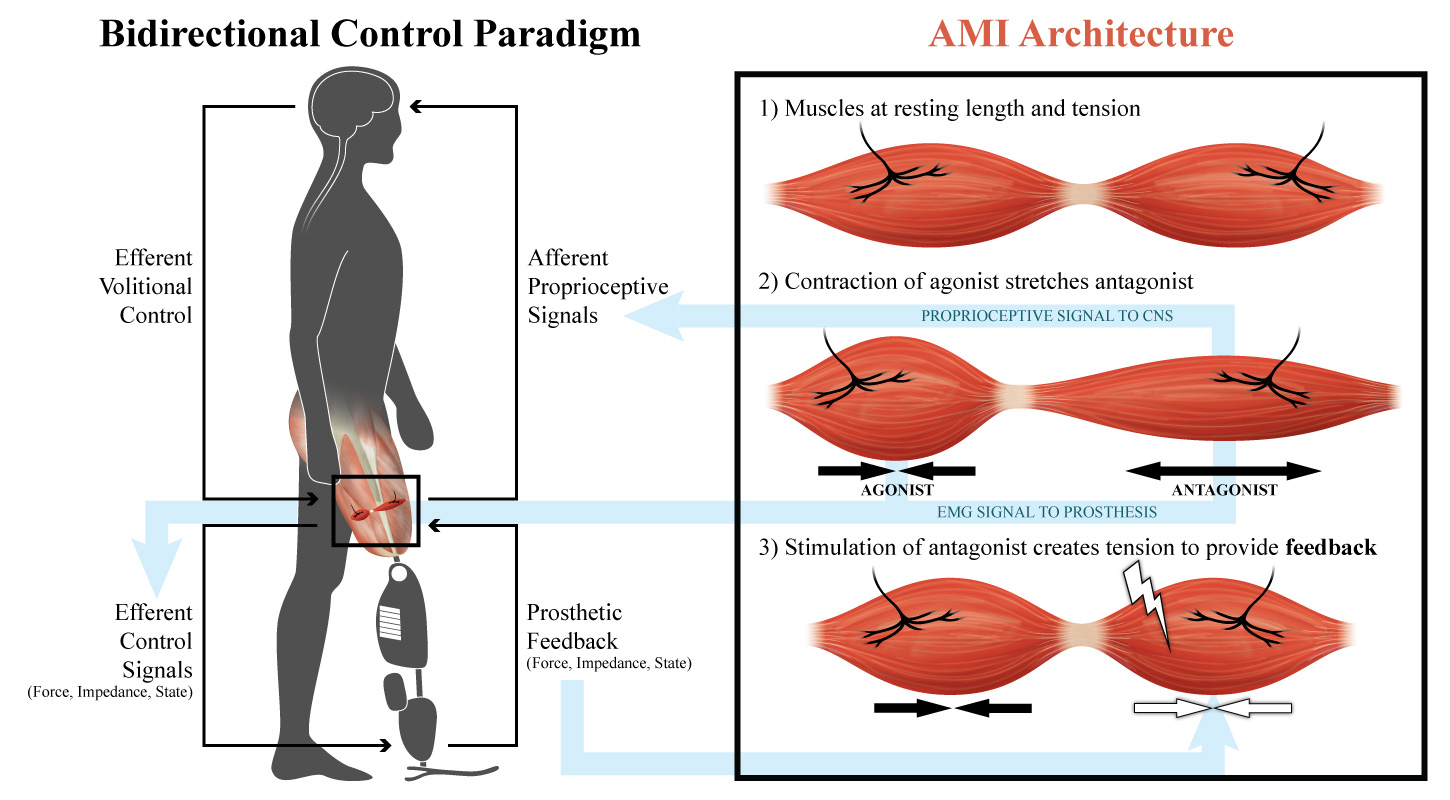
The agonist-antagonist myoneural interface (AMI), a surgical architecture to restore proprioception in amputated limbs and enable bidirectional control of an external prosthesis
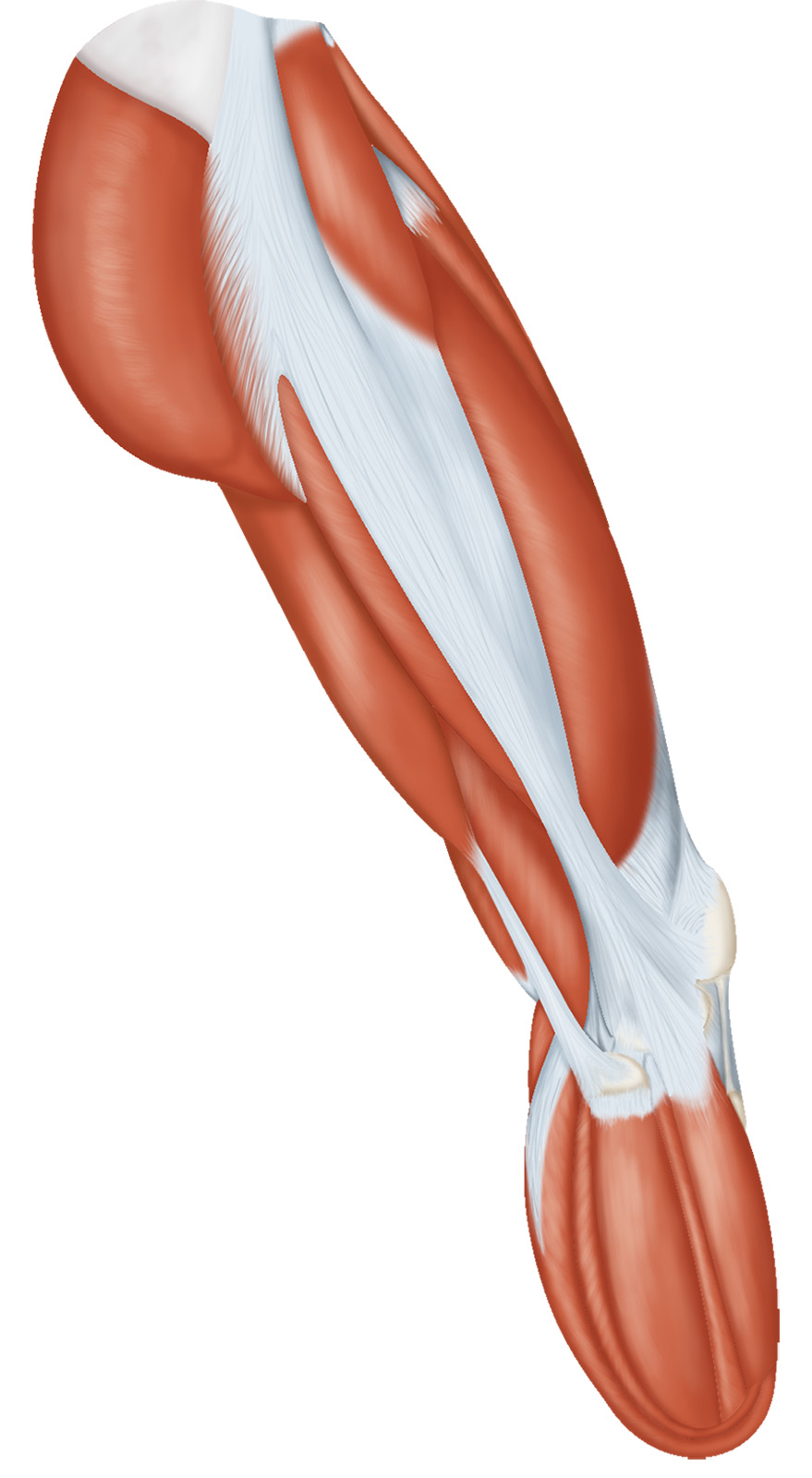
Musculature of a leg with a below-knee amputation
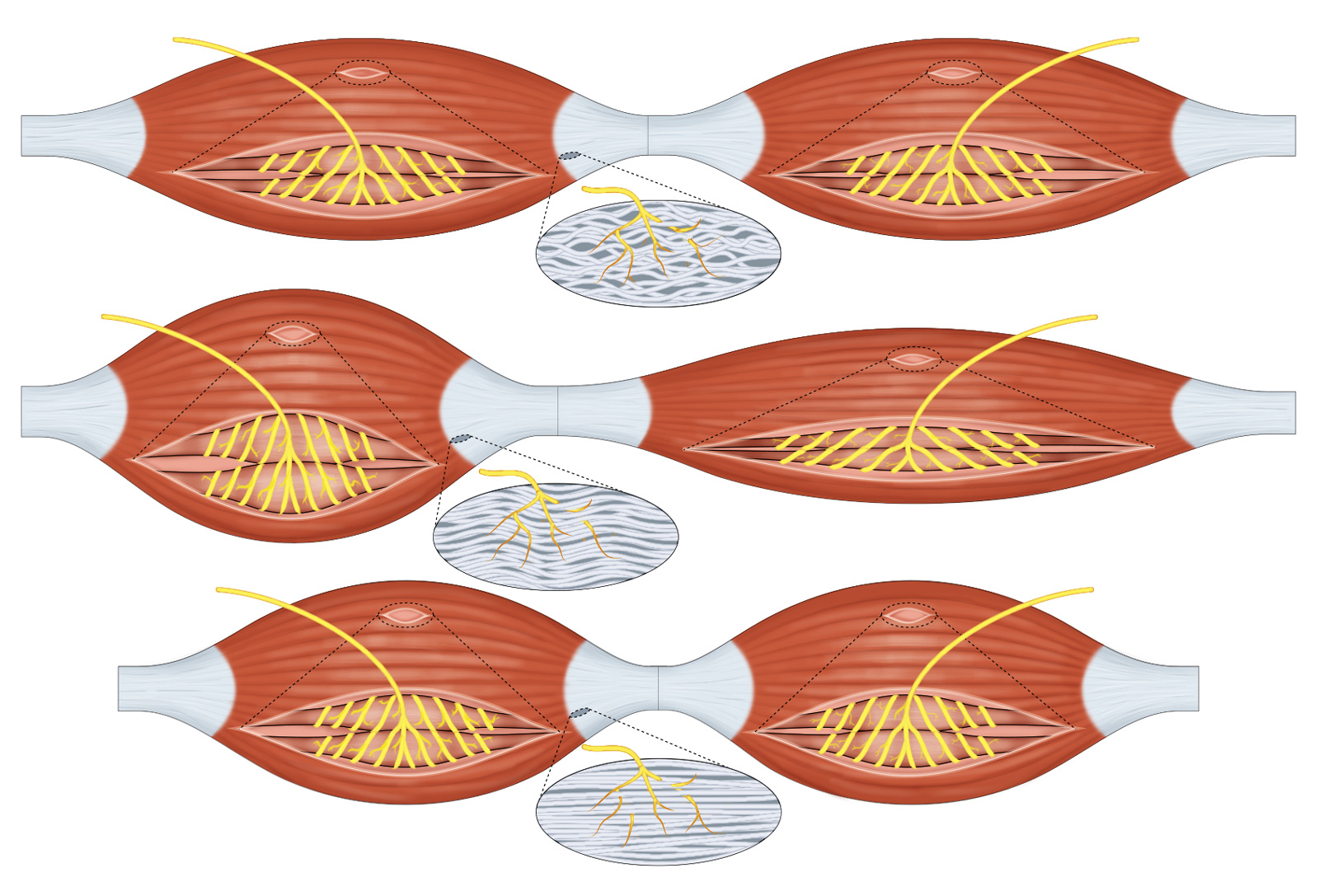
AMI signaling mechanism in linked muscle grafts during rest, agonist contraction, and antagonist contraction in response to artificial stimulation
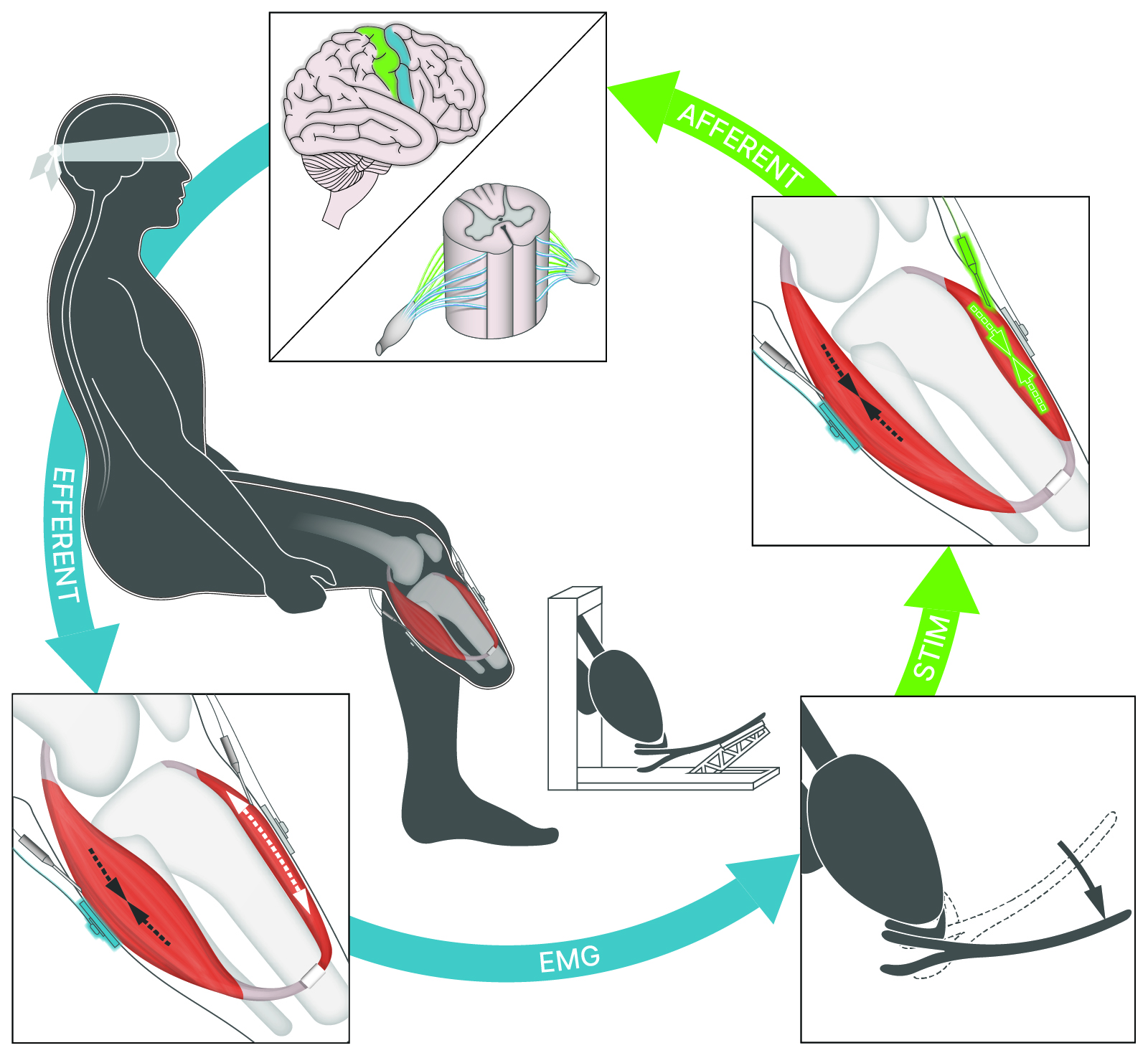
Prosthesis-in-the-loop control architecture for a patient with an AMI, perceiving artificial stimulation as a natural sensation of ankle torque
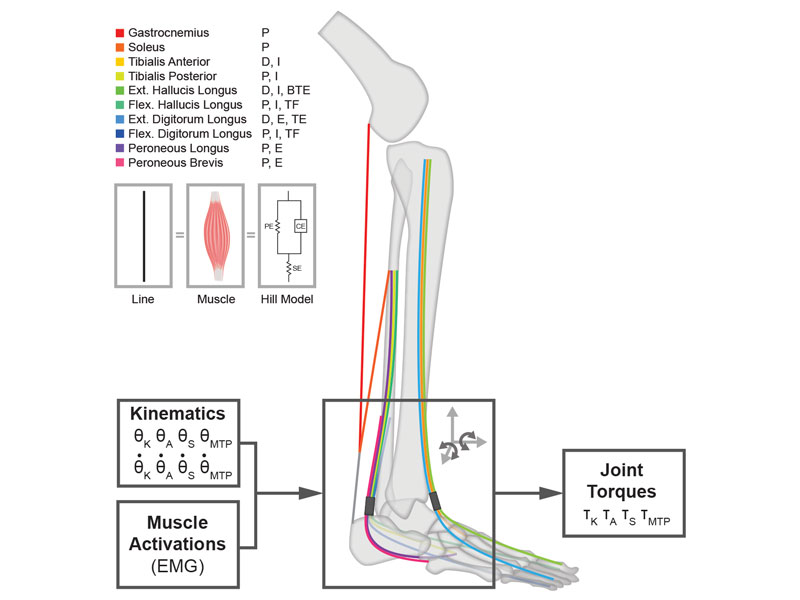
Neuromuscular model of the ankle-foot complex